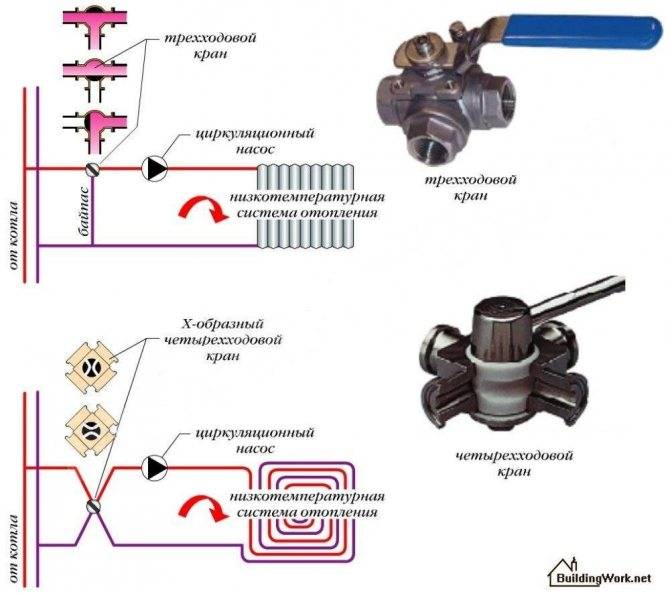
Процесс рекуперации
Зачастую запускается при переключении режимов работы сервомотора: что это такое? Это возвратная энергия, которая выделяется при смене знака (направления движения) относительно вращающего момента. Обычно она не слишком большая, но все равно собирается на конденсаторах, увеличивая, таким образом, напряжение на звене постоянного тока.
В тех же случаях, когда данное неравенство абсолютных значений достигнет серьезной отметки, пороговый уровень емкости шины будет пробит. И тогда все излишки будут сброшены в тормозной резистор.
Мы постарались рассмотреть все особенности данных механизмов и подчеркнуть удобство и перспективность их использования. Предлагаем также взглянуть на схемы сервоприводов, фото и видеоролики на эту тему – чтобы вы могли дополнить свое представление.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия – например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом – при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые
и цифровые
сервоприводы. Первые используют что-то, похожее на потенциометр, вторые – контроллеры.
 Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей – с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
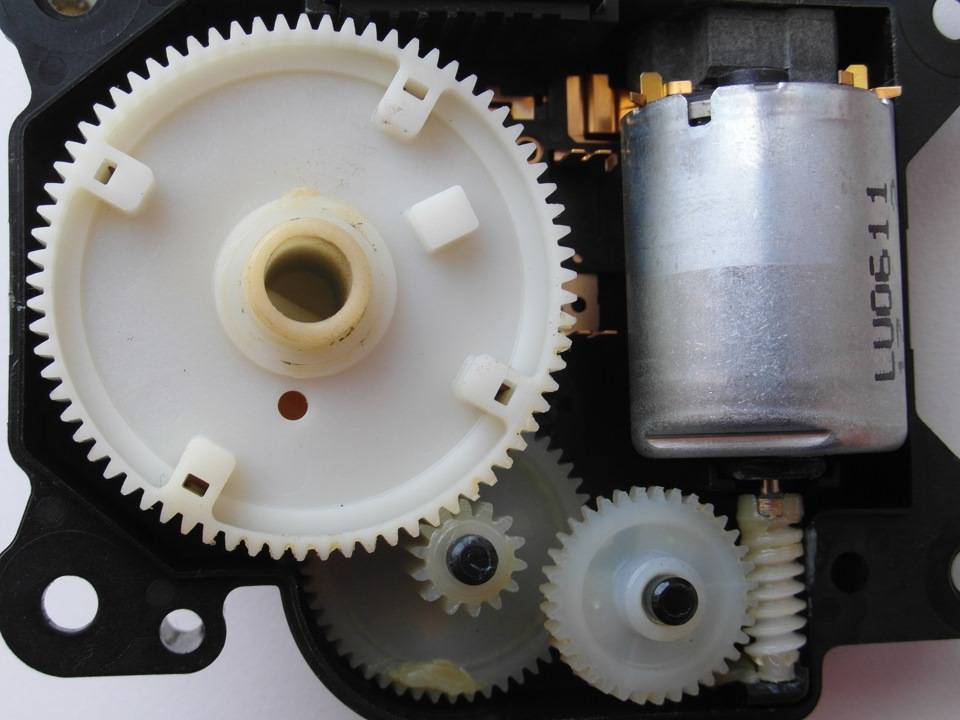

Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.
 Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни – самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.


Отличия серво и шагового мотора
Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания
Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения
Особенности устройства сервопривода переменного тока
Это подвид синхронной модели, у которого ротор вращается с той же частотой, какая присуща магнитному полю, созданному обмотками статора. На последний направляется трехфазное напряжение, запускающее весь процесс функционирования.
На подвижной части закреплен энкодер, разрешающая способность которого сравнительно высокая. От него поступает один сигнал на первый вход, а от электронной платы – другой, на второй. Данная пара сравнивается, и разница между ними является показателем рассогласования, отталкиваясь от которого необходимо задать команду подачи соответствующего вольтажа для скорейшего наступления нулевого момента.
Читая о том, как работает модель, в технической литературе часто можно встретить термин «сервоусилитель»: что это такое? Это плата – блок управления, а мы уже выяснили, что она из себя представляет и для чего необходима, так что не пугайтесь нового определения.
Элементы платы
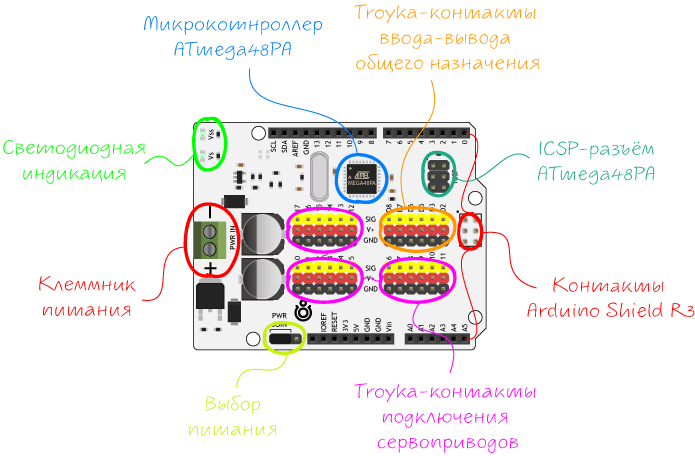
Микроконтроллер ATmega48PA
Плата Multiservo Shield выполнена на микроконтроллере ATmega48PA с прошивкой управления сервоприводами от Амперки. Чип принимает команды по I²C интерфейсу от внешней управляющей платы, например Arduino Uno или Iskra JS, и рулит до 18 сервоприводами в одно время.
Силовой клеммник питания
Для питания сервомоторов используйте клеммник под винт PWR IN.
| Силовой клеммник | Подключение |
|---|---|
| PWR + | Силовое питание |
| PWR − | Земля |
Диапазон входного напряжение должен соответствовать рабочему напряжению подключаемых сервоприводов, т.е. сколько приложили на силовой клеммник, столько и поступит на линию питания моторов. Номинальное напряжения большинства хобби сервоприводов не выходит за рамки диапазона от 5 до 12 вольт.
В качестве источника питания рекомендуем взять:
- Сборку из батареек AA:
- стационарный блок питания:
- И другие источники напряжения.
Контуры питания
На плате расширения MultiServo Shield присутствует два контура питания.
- Силовой контур Vs. Напряжение питания сервомоторов, которое поступает от . Диапазон входного напряжение должен соответствовать номинальному питанию моторов, а суммарный максимальный ток потребления не должен превышать 10 А.
- Цифровой контур Vss. Напряжение питания микроконтроллера и другой вспомогательной логики. Цифровое питание поступает через пин 5V от внешней управляющей платы, например от USB. Входное напряжение соответственно равно 5 вольт, а максимальный ток потребления не более 50 мА.
Если отсутствует хотя бы один из контуров питания Vs или Vss — Multiservo Shield работать не будет. Для информации о текущем состоянии каждого контура .
Джаммер объединения питания
На плате расширения MultiServo Shield , т.е. для работы схемы необходимо два источника напряжения.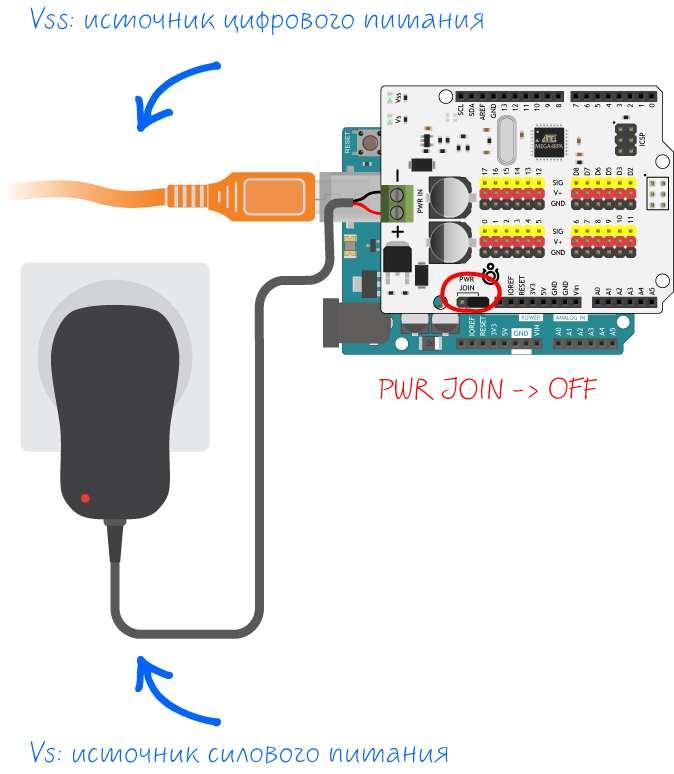
При установки джампера в положение PWR JOIN, происходит объединение положительного контакта + силового клеммника PWR IN с пином Vin управляющей платформы. Режим объединённого питания позволяет запитывать всё устройство от одного источника напряжения. 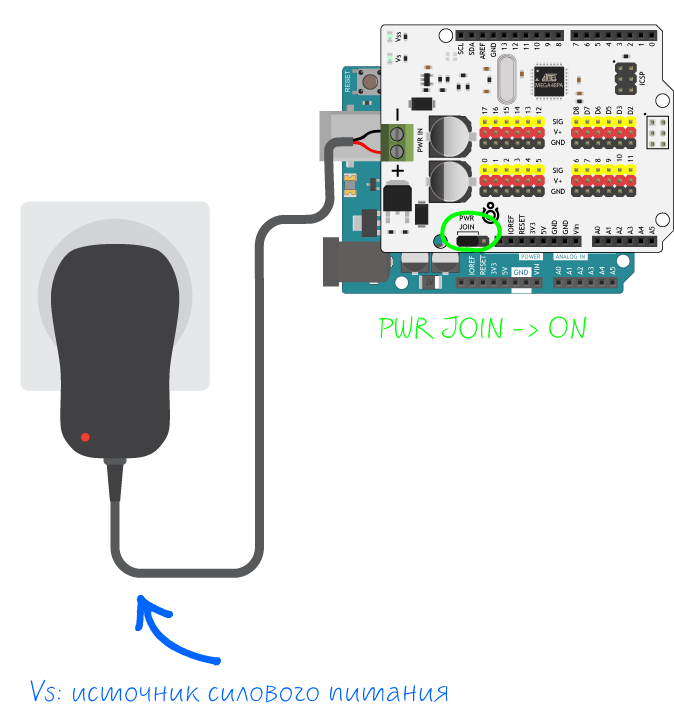
Выбор питания
При объединённом режиме PWR JOIN, напряжение на устройство может быть подано двумя способами:
- На драйвер сервомоторов через клеммник PWR IN.
- На управляющую плату через внешний DC-разъём.
Правила
При объединённом режиме PWR JOIN, важно знать:
- При работе двигателей по цепи питания может проходить большой ток, на который цепь Vin управляющей платформы может быть не рассчитана. Поэтому выбор питания через силовой клеммник PWR IN предпочтительнее.
- Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| Vs / PON | Индикатор подачи силового питания. Горит — напряжение есть, не горит — напряжение нет. |
| Vss / ųON | Индикатор подачи цифрового питания. Горит — напряжение есть, не горит — напряжение нет. |
Troyka-контакты подключения сервоприводов
Сервоприводы подключаются к плата Multiservo Shield через контактные штыри S-V-G, где:
- S — сигнал с номером от 0 до 18.
- V — питание сервомоторов. Берется от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
Troyka-контакты ввода-вывода общего назначения
На плате доступны шесть Troyka-контактов ввода-вывода внешнего контролера, которые можно задействовать в дополнение к основным. Контакты пронумерована S-V-G, где:
- S — сигнал с номером: D2, D3, D5, D6, D7 и D8.
- V — питание от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
ICSP-разъём ATmega48PA
На плате расположен ICSP-разъём, который предназначен для загрузки прошивки в микроконтроллер ATmega48PA через внешний программатор. В нашем случае — это мост, который получает команды по I²C и рулит 18 сервоприводами.





Плата Multiservo Shield выполнена в форм-факторе Arduino Shield R3. а это значит расширение просто одевается сверху на управляющую платформу форм-фактора Arduino R3 методом бутерброда без дополнительных проводов и пайки. В итоге вам остаются доступны все физические контакты вашего контроллера для дальнейшего использования.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный – к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам – принцип управления серво мы уже описывали ранее.
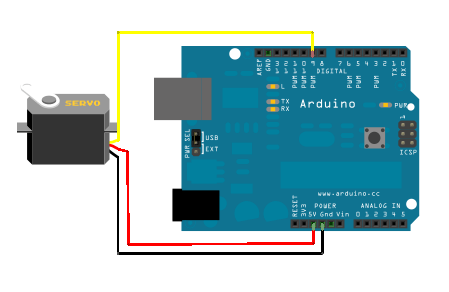
Не рекомендуется подключать мощные серво напрямую к плате, т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью – повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в “дергании” серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
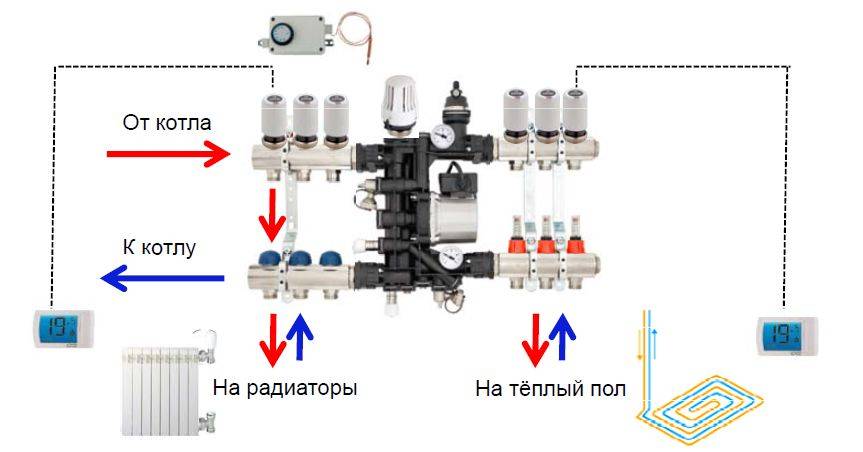
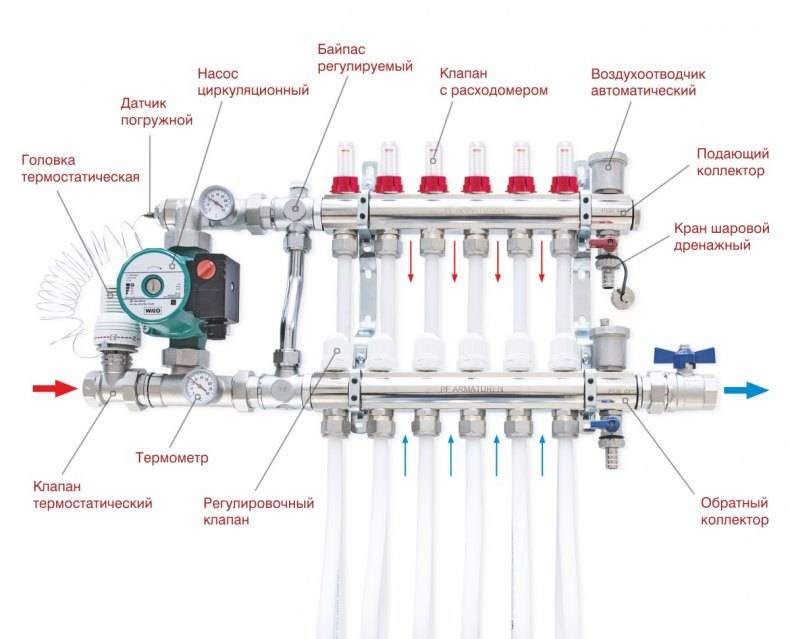
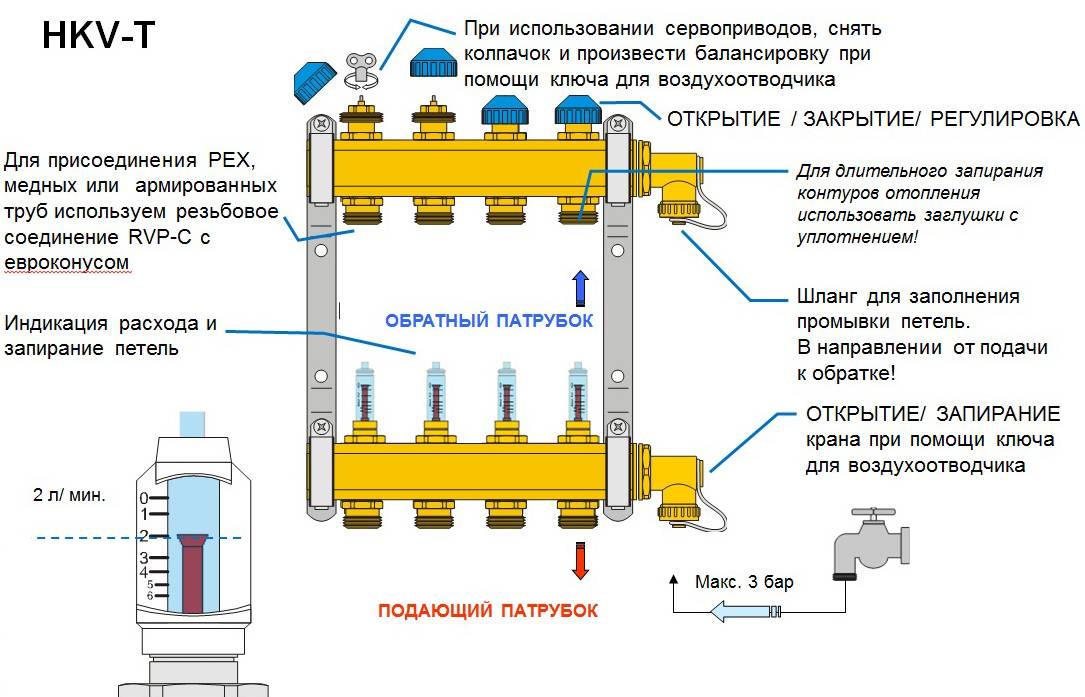
Функциональные основы и базовые разновидности коллекторов
Схема работы коллектора для теплого пола достаточно проста. Теплоноситель от котла отопления поступает в подающий распределитель. Его рекомендуют размещать сверху (над возвратной гребенкой), однако, в зависимости от местных монтажных особенностей, а также разновидности подключаемого смесительного узла, он может устанавливаться и внизу. Корпус коллектора имеет от двух и более ответвлений, оборудованных соответствующей запорно-регулирующей арматурой. По каждой из веток теплоноситель перенаправляется в определенные трубопроводы ТП. Выходной конец трубной петли замыкается на возвратной гребенке, направляющей собранный общий поток к котлу отопления.
Очевидно, что в самом простом случае коллектор для водяного теплого пола представляет собой кусок трубы с неким количеством резьбовых отводов. Однако, в зависимости от того какую конечную комплектацию он получит, сложность его сборки, настройки и стоимость могут изменяться в разы. Рассмотрим для начала наиболее популярные базовые модели распределителей для водяного ТП.
С фитингами для подключения контуров
Одной из самых бюджетных, но полностью готовой к использованию является гребенка с входной/выходной резьбами и фитингами для подсоединения металлопластиковых или труб из цельносшитого полиэтилена. Одна из таких моделей изображена на фото ниже.
Рисунок 2.
С интегрированными кранами
В минимальной комплектации можно также встретить коллектор на теплый пол оборудованный двухходовыми шаровыми кранами (Рис. 3). Такие устройства не предусматривают поконтурную регулировку – они рассчитаны только включить или выключить отдельные отопительные ветки. Учитывая, что система теплый пол приобретается и устанавливается для повышения комфорта проживающих, который обеспечивается точной подстройкой системы, целесообразность использования таких гребёнок имеет сугубо выборочный характер. На фото представлен подобный коллектор на три контура с интегрированными двухходовыми шаровыми кранами.
Приобретая указанные бюджетные варианты распределителей, следует учитывать, что их использование требует фундаментальных знаний, а также большого опыта в монтаже систем отопления. Кроме того, закупочная экономия является довольно условной, так как всё дополнительное оборудование придется докупать отдельно. Практически упрощенные коллектора для теплого водяного пола без доработки подходят только для вспомогательных систем на одну-две петли небольшой протяженности. Годятся они и для нескольких контуров, но имеющих идентичные тепловые и гидравлические характеристики. Ведь конструкции таких гребенок не предоставляет технической возможности установки контрольно-регулирующего оборудования непосредственно на каждую ветку.
Рисунок 3.
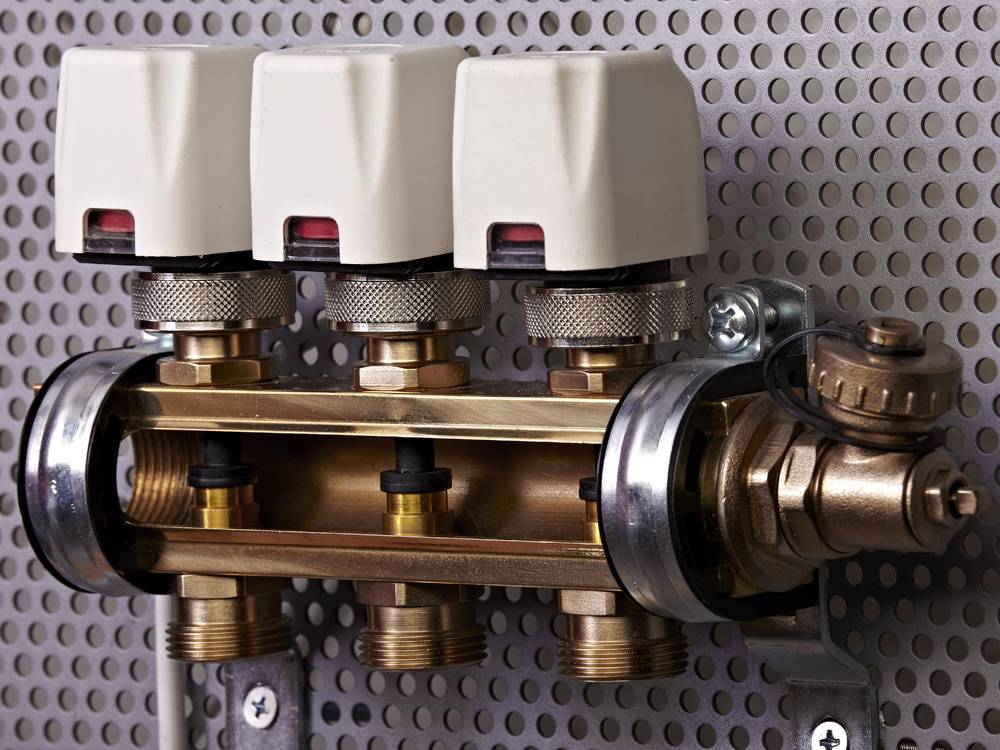
С регулировочными вентилями
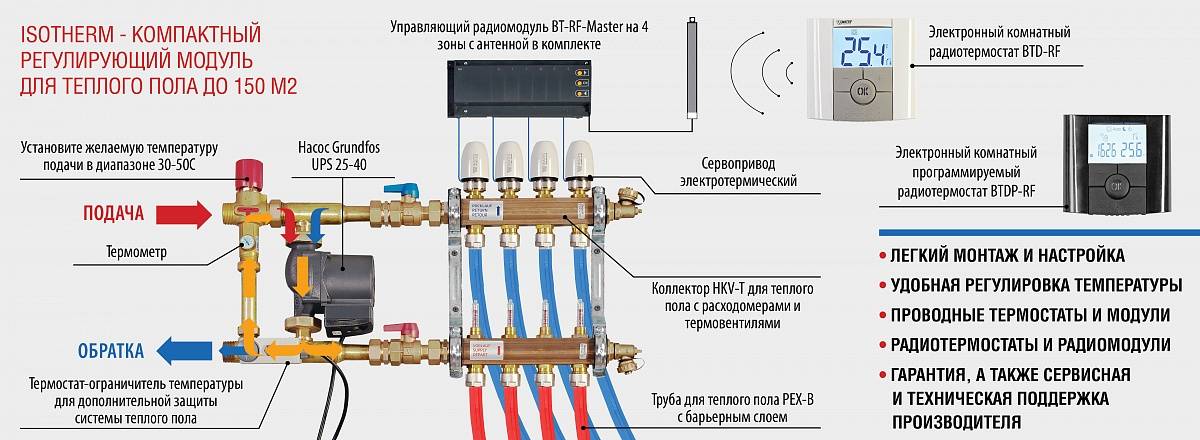
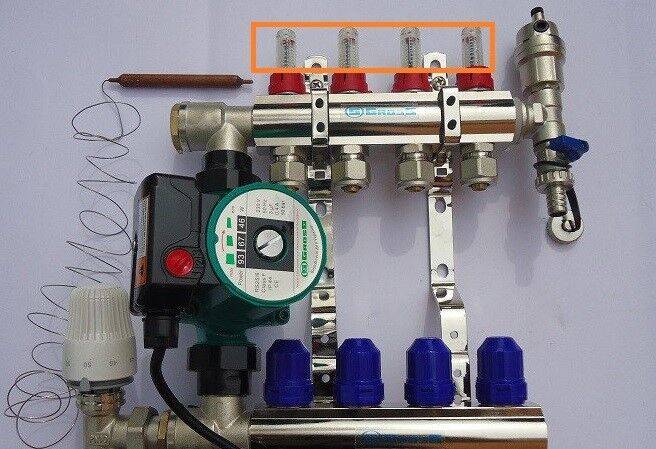
Следующий уровень, как по стоимости, так и по функциональности – это распределительный коллектор для тёплого пола с регулировочными вентилями. Такие устройства, эксплуатируясь в ручном режиме, уже могут обеспечить настройку интенсивности подачи теплоносителя по отдельным отопительным контурам. Для них в большинстве случаев существует техническая возможность установки на них вместо ручных вентилей исполнительные устройства с сервоприводами. Приводы могут подключаться либо непосредственно к электронным термодатчикам, установленным в помещениях, либо к центральному программируемому устройству контроля. На рисунке 4 показан пример гребенки с регулировочными вентилями.
Рисунок 4.
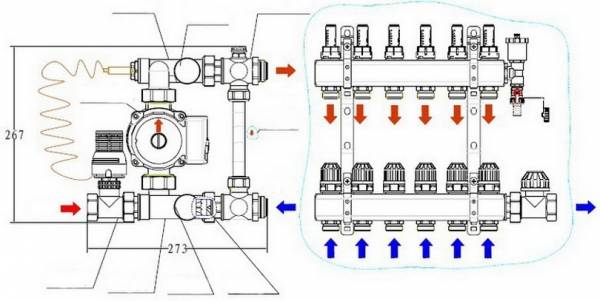
Сборка из подающего и обратного коллекторов
К эконом варианту коллектора для теплого водяного пола относятся также и спаренные сборки из подающего и обратного распределителей (Рис. 5). В них уже могут быть предусмотрены дополнительные монтажные отверстия или установлены краны Маевского, группы безопасности, быстроразъемные резьбовые «американки» для удобства подключения к первичным контурам отопления или смесительному узлу.
Рисунок 5.
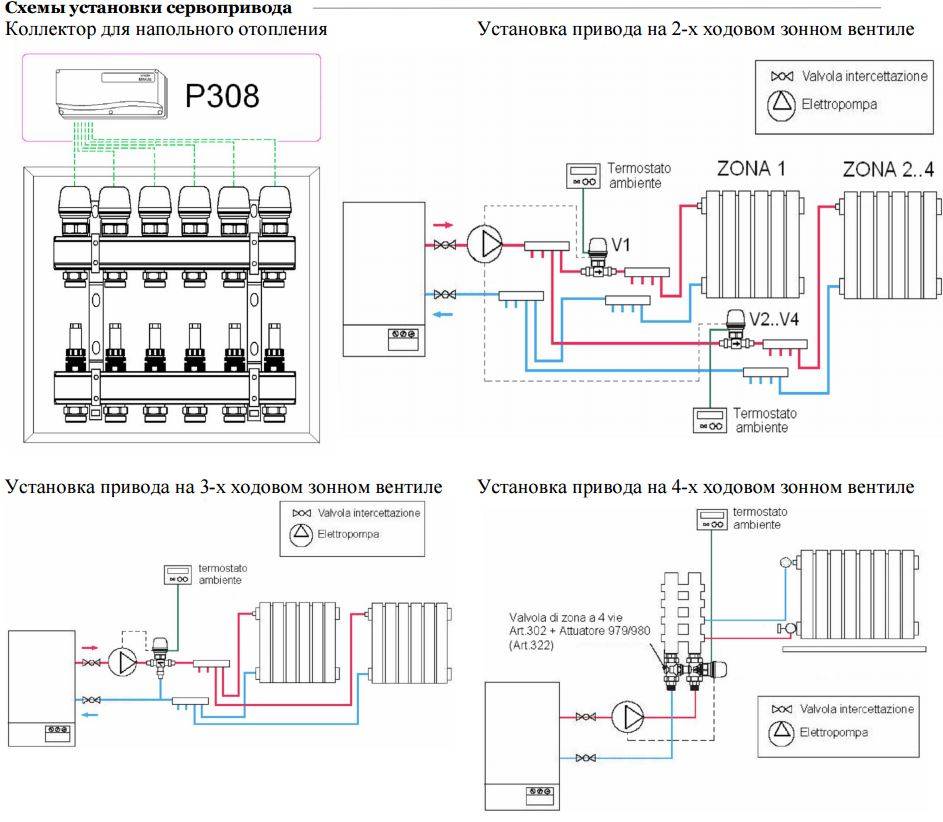
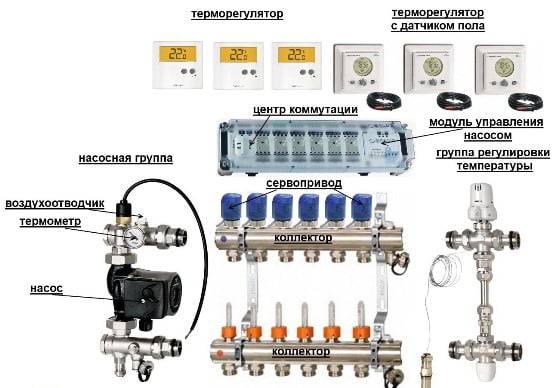
Основные виды сервоприводов

Нормальная работа теплых полов зависит от множества факторов. Сама по себе, это достаточно сложная конструкция, включающая большое количество компонентов, требующих правильной установки. Среди всех устройств, особое место занимают сервоприводы, выпускаемые в нескольких вариантах:

![Сервоприводы: подключение, управление, примеры работы [амперка / вики]](https://clima-profi.ru/wp-content/uploads/a/6/2/a62cc836886b897caede67b66ed3f200.jpeg)
![Драйвер сервоприводов multiservo shield v2 [амперка / вики]](https://clima-profi.ru/wp-content/uploads/5/e/0/5e01fb18af316715d92fd1cc21a5c636.jpeg)
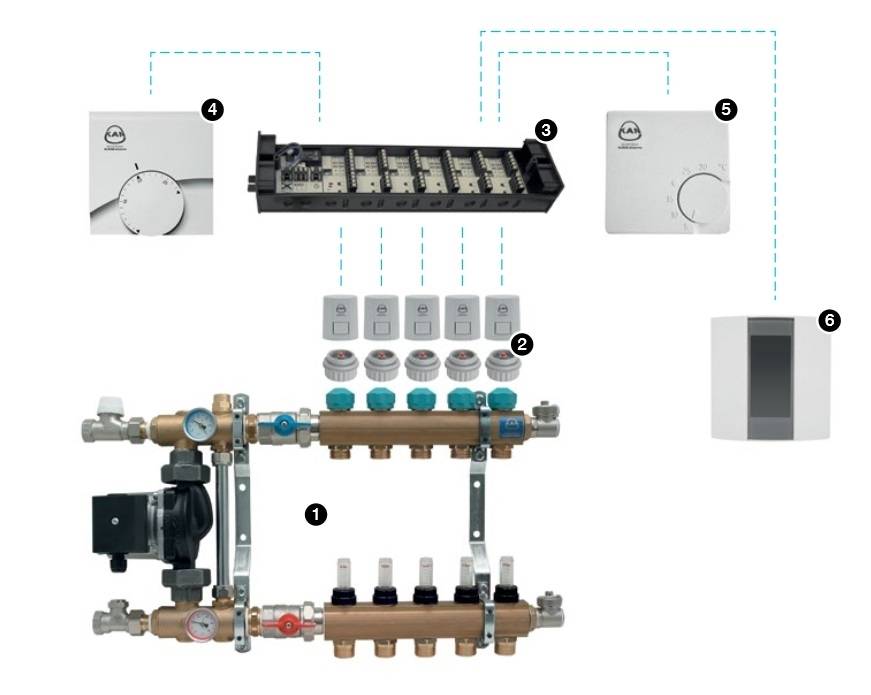


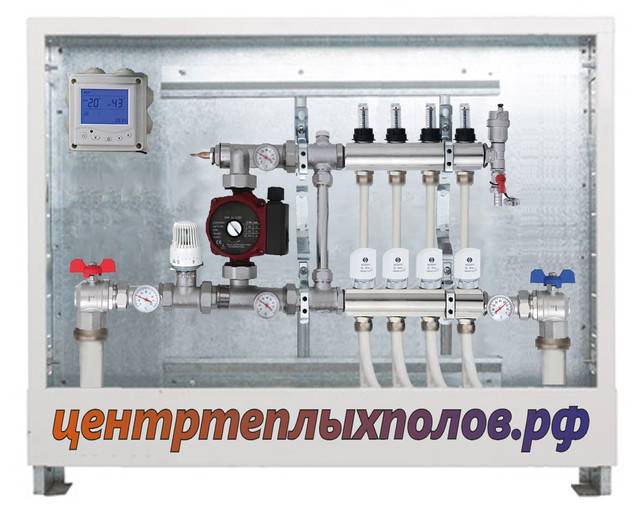



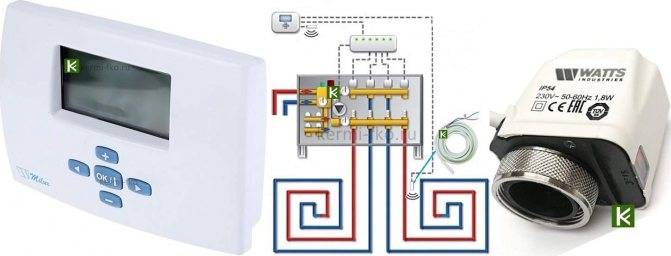
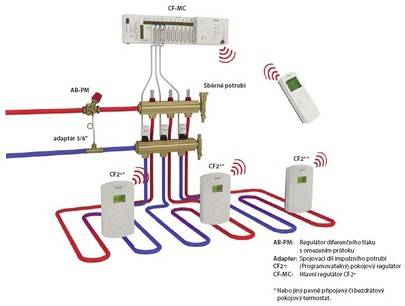
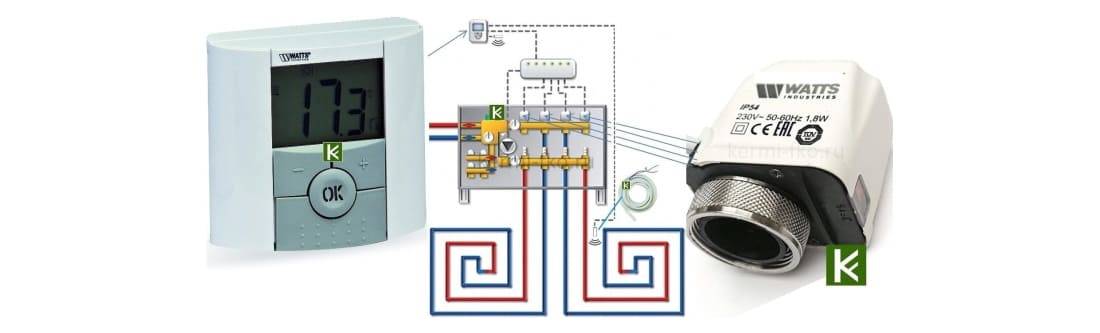
- Механические (рис.1). Отличаются простейшей конструкцией и таким же простым управлением. Они долговечны и стоят сравнительно недорого. Регулировка температурного режима выполняется обычным поворотом колесика в разные стороны. После чего температура увеличивается или уменьшается. Работа механических устройств не требует постоянного контроля, поскольку все дальнейшие действия будут осуществляться автоматически. Минусом такого сервопривода считается невозможность программирования минимального значения температуры, а все настройки выполняются вручную.
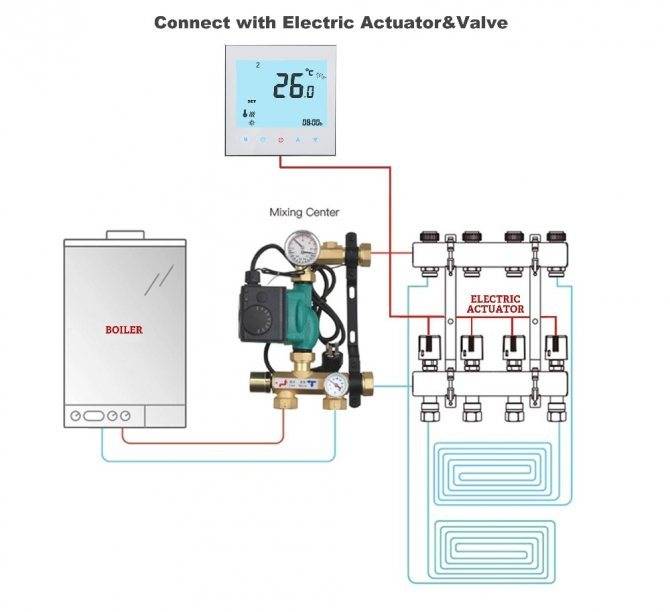
- Электронные (рис.2). Данные сервоприводы обладают значительно большим количеством функций. С помощью небольшого дисплея возможно вести наблюдение за работой всей конструкции теплых полов, быстро обнаруживать нерабочие процессы. Конструкция такая же простая, как и в случае с механическим вариантом, только она гораздо удобнее и эффективнее. Все регулировки рабочих процессов осуществляются в автоматическом режиме, то есть присутствие человека вообще не требуется. Единственным заметным недостатком является высокая стоимость.
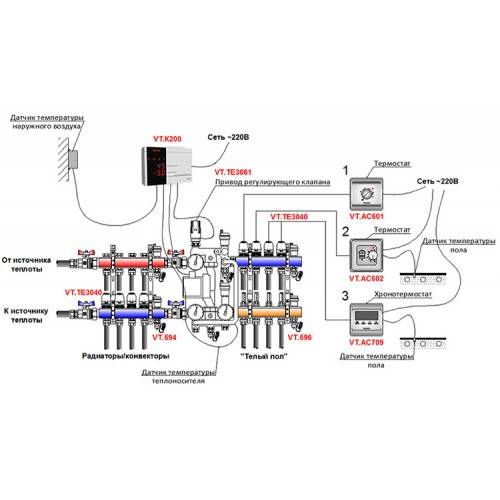
- Дистанционные (рис.3). Основным достоинством таких приборов является возможность выполнения всех настроек на расстоянии от коллектора, где установлен сервопривод. В схему дистанционных устройств включены два датчика, обеспечивающих точное слежение и контроль над температурными показателями помещения. За счет этого сервопривод имеет возможность действовать примерно в 8-10 различных режимах и контролировать расход электроэнергии. Рекомендуется использовать те приборы, которые поступают в комплекте со всей системой водяных теплых полов.
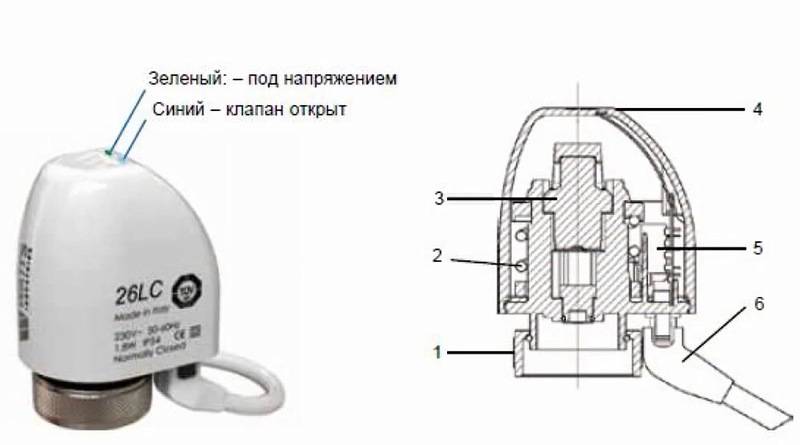
Вся аппаратура классифицируется и разделяется также на приборы закрытого и нормально открытого типа. В первом варианте клапан изначально установлен в закрытом положении, поэтому проход теплоносителя будет невозможен даже при включении электротока. Во втором случае нормально открытый сервопривод для теплого пола пропускает через себя нагретую воду без каких-либо препятствий.
В настоящее время появились современные устройства с универсальными функциями, в которых нормальное положение устанавливается по необходимости. Во время работы оно может изменяться из положения «открыто» на «закрыто» и обратно.
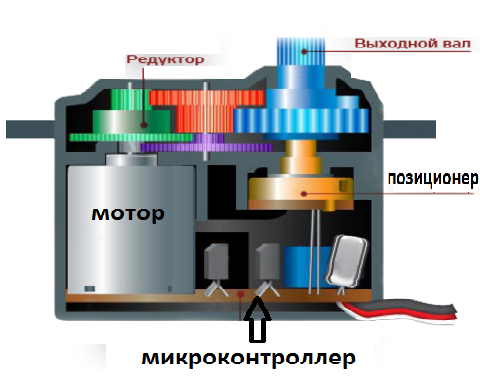
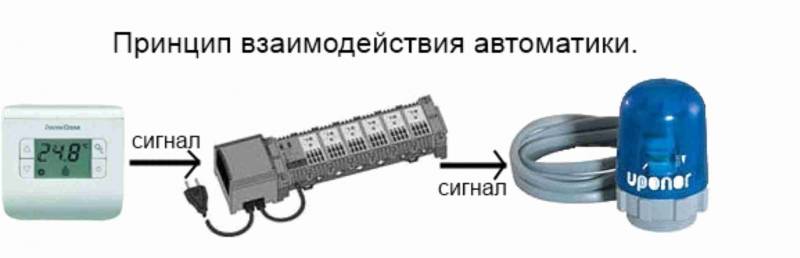
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Скетч для Arduino
- ir-servo-robot.ino
// библиотека для ИК приёмника #include <IRremote.h> // подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservoFordL; Servo myservoFordR; Servo myservoBackL; Servo myservoBackR; // даем имя пину подключения ИК приёмника int RECV_PIN = 4; // указываем к какому пину подключен ИК приёмник IRrecv irrecv(RECV_PIN); decode_results results; void setup() { // запускаем работу ИК приемника irrecv.enableIRIn(); // подключаем сервоприводы myservoFordL.attach(8); myservoFordR.attach(9); myservoBackL.attach(10); myservoBackR.attach(11); } void loop() { // принимаем данные с ИК пульта // в зависимости от нажатой кнопки пульта // даём разные команды роботу if (irrecv.decode(&results)) { if (results.value == 0x1689609F) { ford(); } else if (results.value == 0x1689B847) { back(); } else if (results.value == 0x168910EF) { left(); } else if (results.value == 0x16899867) { right(); } else if (results.value == 0x168938C7) { stop(); } // ждем следующее значение irrecv.resume(); } //делаем задержку delay(100); } // функция движение вперёд void ford() { myservoFordL.write(); myservoFordR.write(180); myservoBackL.write(); myservoBackR.write(180); } // функция движение назад void back() { myservoFordL.write(180); myservoFordR.write(); myservoBackL.write(180); myservoBackR.write(); } // функция поворота налево void left() { myservoFordL.write(180); myservoFordR.write(180); myservoBackL.write(180); myservoBackR.write(180); } // функция поворота направо void right() { myservoFordL.write(); myservoFordR.write(); myservoBackL.write(); myservoBackR.write(); } // функция остановки void stop() { myservoFordL.write(90); myservoFordR.write(90); myservoBackL.write(90); myservoBackR.write(90); }
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту 5V или напрямую к источнику питания
коричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода: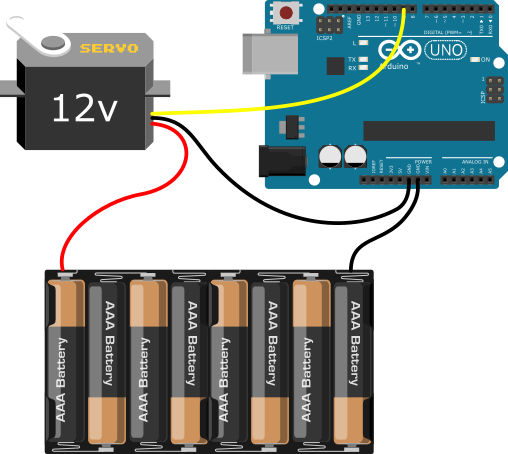
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объект для управления сервоприводомServo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
По аналогии подключим 2 сервопривода
2servo_example.ino// подключаем библиотеку для работы с сервоприводами#include <Servo.h> // создаём объекты для управления сервоприводамиServo myservo1;Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12);} void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500);}







Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
servo2_example.ino// подключаем библиотеку для работы с сервоприводами// данная библиотека совместима с библиотекой «VirtualWire»// для работы с приёмником и передатчиком на 433 МГц#include <Servo2.h> // создаём объект для управления сервоприводомServo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9);} void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500);}
Какие сервоприводы применяются?
Широкое распространение серводвигателей повлекло за собой появление их различных видов, которые можно разделить по следующим критериям:
Типы привода:
Линейные – самый быстрый разгон, высокая точность, долговечность. Примеры: актуатор, линейный модуль (см. рис.), линейные серводвигатели. |
|

Принцип действия:
Материал редуктора:
|
| Тип ротора: Монолитный ротор – вибрирует при вращении, невысокая точность; |
Способ управления:
|
Устройство и принцип работы сервомоторов
Основным рабочим элементом сервопривода является сильфон. Т.е. такая же деталь, как и в трехходовом клапане. Небольшой по размерам, герметичный цилиндр с эластичным корпусом заполнен веществом, чутко реагирующим на температуру. В зависимости от того, происходит повышение или понижение температуры, происходит соответственно изменение объема вещества. Рисунок – схема наглядно демонстрирует устройство сервомотора, где основным местом занимает сильфон.
Сильфон находится в тесном контакте с электрическим нагревательным элементом. Получая сигнал с термостата, нагревательный элемент включается от сети и включается в работу. Внутри сильфона вещество подогревается и увеличивается в объеме. Таким образом, увеличившийся в размерах цилиндр начинает давить на шток, меняя его положение и перекрывая путь потоку теплоносителя. Оценивая работу сервопривода можно сделать вывод – прибор не оснащен никакими моторами, в нем нет никаких шестерней и передаточных звеньев. Обычная рабочая связь «тепловая энергия и электричество». Отсюда и распространенное название приборов, термоэлектрические регуляторы.
Для того, что бы клапан снова стал открытым, весь процесс повторяется только в обратном направлении. Отсутствие электропитания приводит к тому, что нагревательный элемент перестает работать. Следовательно, вещество внутри цилиндра остывает, уменьшаясь в объеме. Давление на шток уменьшается, он подымается, действуя на клапан, а, следовательно, открывается доступ горячей воды в систему.
Ознакомившись с принципом работы устройства, важно помнить, что для механического действия клапана необходимо определенное время. Несмотря на то, что при поступлении сигнала с термостата, нагревательный элемент начинает нагревать вещество внутри цилиндра. Время, необходимое на изменения физического состояния жидкости, составляет 2-3 минуты, поэтому клапан приводится в действие не сразу. В отличие от нагрева, остывание жидкости проходит медленнее
На обратный процесс, т.е. на закрытие клапана потребуется уже не 2-3 минуты, а 10-15 минут. При перегреве каждый сервомотор должен автоматически отключаться. Для этого в конструкции предусмотрен механизм аварийного отключения
В отличие от нагрева, остывание жидкости проходит медленнее. На обратный процесс, т.е. на закрытие клапана потребуется уже не 2-3 минуты, а 10-15 минут. При перегреве каждый сервомотор должен автоматически отключаться. Для этого в конструкции предусмотрен механизм аварийного отключения.
Для примера: используемые в работе коллекторной группы сервоприводы не все оснащаются цилиндрами и баллонами с веществом. Ест модели, в которых эту роль играют термоэлементы, напоминающие собой пружину или пластину, которые под действием все того же нагревательного элемента нагреваются. Расширяясь, эти детали воздействуют опять же, на шток, приводя в конечном итоге в рабочее состояние клапан. Определить в каком положении находится клапан, можно по изменению внешнего вида сервопривода. Выдвигающийся элемент сигнализирует о работе прибора. Если этого не происходит, значит, ваш прибор неправильно подключен или система отопления работает с перебоями.
![Сервоприводы: подключение, управление, примеры работы [амперка / вики]](https://clima-profi.ru/wp-content/uploads/b/3/0/b30b1740eb24c10f2856aad232eb1133.jpeg)






Как устроен сервопривод
Обычный сервопривод для теплого пола по принципу «включил-выключил» чаще сделан на основе емкости с расширяющейся жидкостью, толуола. При подаче напряжения емкость подогревается спиралью, жидкость расширяется и давит на шток. При отключении объем жидкости уменьшается, происходит возврат в первоначальное положение.
Также возможен вариант конструкции с нагревающейся пластиной, но принцип тот же — при нагреве происходит выдвижение штока. Эти конструкции сервоприводов просты, в них отсутствует электромагнитный движитель и вращение штока, их часто называют также «теплоприводами».
Выдвижение штока будет происходить с задержкой на 1 — 3 минуты, после подачи напряжения как и его возврат после отключения. Но нас интересует, что будет происходить в самой системе при включении и выключении сервопривода, т.е. необходимо рассматривать как ведет себя при этом управляемый клапан…